sim
对 Simulink 模型进行仿真
语法
说明
Simulink.SimulationInput 对象语法
simOut = sim(simIn)Simulink.SimulationInput 对象上定义的属性,运行 Simulink® 模型的一个或多个仿真。
如果
simIn是标量Simulink.SimulationInput对象,则simOut是标量Simulink.SimulationOutput对象。如果
simIn是Simulink.SimulationInput对象数组,则simOut是Simulink.SimulationOutput对象数组。
您可以使用 SimulationInput 对象来配置仿真的选项和输入,包括:
要仿真的模型
外部输入数据的源变量或文件
用于仿真的模块参数值
用于仿真的模型配置参数值
当 SimulationInput 对象的属性修改模型或模块参数值时,该值将在仿真期间修改,并在仿真结束时还原。
当您使用 SimulationInput 对象配置程序化仿真时,您可以轻松地从使用 sim 函数转换为使用其他函数,如 parsim 和 batchsim。
有关详细信息,请参阅以编程方式运行仿真。
simOut = sim(simIn,Name,Value)Simulink.SimulationInput 对象 simIn 上定义的属性仿真模型,并使用由一个或多个名称-值参数指定的附加选项。
有关 Simulink.SimulationInput 语法支持的名称-值参数列表,请参阅Simulink.SimulationInput 对象语法。
模型名称语法
simOut = sim(modelName)modelName 指定的模型。
如果模型启用了单一仿真输出参数,则
simOut是一个Simulink.SimulationOutput对象。如果模型未启用单一仿真输出参数,则
simOut是一个包含仿真时间的向量。有关详细信息,请参阅不推荐返回多个输出参数。
simOut = sim(modelName,Name,Value)modelName 指定的模型,并使用由一个或多个名称-值参数指定的选项。例如,通过将参数名称和值指定为名称-值参量,可以修改仿真的模型配置参数值。
当您通过向 sim 函数提供输入来修改模型配置参数时,这些更改将在仿真期间应用,并在仿真结束时还原。
有关模型名称语法支持的名称-值参数列表,请参阅模型名称语法。
simOut = sim(modelName,paramStruct)paramStruct 指定的模型配置参数值仿真由 modelName 指定的模型。
示例
使用 Simulink.SimulationInput 对象配置仿真
您可以使用 Simulink.SimulationInput 对象来存储独立于仿真模型的仿真配置。Simulink.SimulationInput 对象中的配置将应用于仿真模型。仿真后,任何发生更改的模型设置都将还原为原始值。
打开模型 IntegrateSine。该模型使用 Integrator 模块对 Sine Wave 模块的输出进行积分。Integrator 模块的输出连接到 Outport 模块。

mdl = "IntegrateSine";
open_system(mdl)创建一个 Simulink.SimulationInput 对象来存储模型 IntegrateSine 的仿真配置。
simIn = Simulink.SimulationInput(mdl);
使用 setModelParameter 函数将 SimulationInput 对象配置为使用 ode45 求解器并将仿真停止时间设为 20 秒。
simIn = setModelParameter(simIn,"Solver","ode45",... "StopTime","20");
使用 setBlockParameter 函数配置 SimulationInput 对象,将 Sine Wave 模块的振幅参数设置为 2。
blk = strcat(mdl,"/Sine Wave"); simIn = setBlockParameter(simIn,blk,"Amplitude","2");
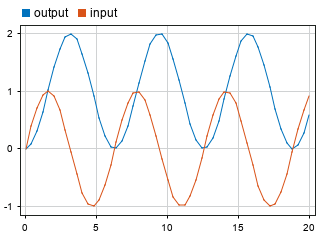
使用存储在 Simulink.SimulationInput 对象 simIn 中的配置对模型进行仿真。
out = sim(simIn);
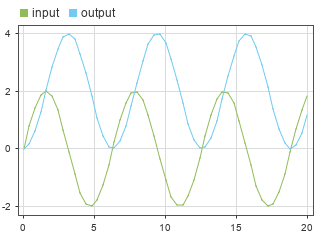
该模型对 Sine Wave 模块使用 ode45 求解器,以 2 为振幅仿真 20 秒。
使用快速重启运行一组仿真
当您使用 Simulink.SimulationInput 对象数组来配置一组仿真时,只需调用一次 sim 函数即可使用快速重启运行一组仿真。快速重启通过在各次仿真运行之间保持模型编译来节省仿真时间。
打开模型 IntegrateSine。该模型使用 Integrator 模块对 Sine Wave 模块的输出进行积分。Integrator 模块的输出连接到 Outport 模块。
mdl = "IntegrateSine";
open_system(mdl)
假设您要运行一组(包含六个)仿真,每个仿真对 Sine Wave 模块使用不同频率值。创建一个包含各个仿真的频率值的向量。
freqs = [0.5 1 1.5 2 2.5 3];
当您要调节模块参数时,可以使用变量定义参数值。然后,通过更改变量值来调节模块参数。
定义变量 freq,将其用作 Sine Wave 模块的频率参数的值。对于初始变量值,可以使用当前参数值。
blk = mdl + "/Sine Wave"; freq = str2double(get_param(blk,"Frequency"));
将 Sine Wave 模块的 Frequency 参数值设置为 freq。
set_param(blk,"Frequency","freq")
在 for 循环中,创建一个包含六个 Simulink.SimulationInput 对象的数组,并使用 setVariable 函数来配置每个对象以使用频率向量中的值。
for k = length(freqs):-1:1 simIn(k) = Simulink.SimulationInput(mdl); simIn(k) = setVariable(simIn(k),"freq",freqs(k)); end
使用 sim 函数运行由 SimulationInput 对象 simIn 的数组定义的仿真。使用 UseFastRestart 名称-值参数启用快速重启。仅当第一个输入参数是 Simulink.SimulationInput 对象时,才支持 UseFastRestart 名称-值参数。要在第一个参数是模型名称时使用快速重启,请使用 FastRestart 名称-值参数。
out = sim(simIn,"UseFastRestart","on");
[28-Feb-2023 11:45:06] Running simulations... [28-Feb-2023 11:45:11] Completed 1 of 6 simulation runs [28-Feb-2023 11:45:12] Completed 2 of 6 simulation runs [28-Feb-2023 11:45:12] Completed 3 of 6 simulation runs [28-Feb-2023 11:45:12] Completed 4 of 6 simulation runs [28-Feb-2023 11:45:12] Completed 5 of 6 simulation runs [28-Feb-2023 11:45:12] Completed 6 of 6 simulation runs
要运行同一组仿真而不显示进度消息,请将 ShowProgress 名称-值参数指定为 off。
out = sim(simIn,"UseFastRestart","on","ShowProgress","off");
要使用仿真管理器监控仿真的进度,请将 ShowSimulationManager 名称-值参数指定为 on。有关仿真管理器的详细信息,请参阅Simulation Manager。
out = sim(simIn,"UseFastRestart","on",... "ShowProgress","off","ShowSimulationManager","on");
仿真输出 out 是包含每个仿真的元数据和结果的 Simulink.SimulationOutput 对象数组。输出数组中 SimulationOutput 对象的顺序与输入数组中 SimulationInput 对象的顺序匹配。例如,索引 1 处的 SimulationOutput 对象包含使用索引 1 处的 SimulationInput 对象配置的仿真的结果。
访问第一次仿真结果记录的输出信号,第一次仿真使用的频率值为 0.5。
youtPt5 = out(1).yout
youtPt5 =
Simulink.SimulationData.Dataset 'yout' with 1 element
Name BlockPath
______ _____________________
1 [1x1 Signal] output IntegrateSine/Outport
- Use braces { } to access, modify, or add elements using index.
使用当前配置仿真模型
打开模型 IntegrateSine。该模型使用 Integrator 模块对 Sine Wave 模块的输出进行积分。Integrator 模块的输出连接到 Outport 模块。
mdl = "IntegrateSine";
open_system(mdl);
使用当前配置参数值仿真模型。
out = sim(mdl);
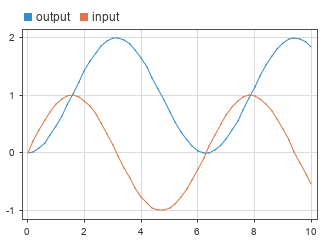
仿真运行 10 秒,对振幅为 1 的正弦波求积分。
您可以使用 set_param 函数修改模型中的模型配置参数值和模块参数值。
配置模型以使用 ode45 求解器并将仿真停止时间设为 20 秒。
set_param(mdl,"Solver","ode45","StopTime","20")
将 Sine Wave 模块的振幅参数设置为 2。
blk = strcat(mdl,"/Sine Wave"); set_param(blk,"Amplitude","2")
当您使用 set_param 函数修改配置参数值或模块参数值时,更改会应用于模块图并弄脏模型文件。当您再次调用 sim 函数时,即使您没有保存模型,仿真也会使用新参数值,这些参数值是当前模型配置的一部分。
out2 = sim(mdl);
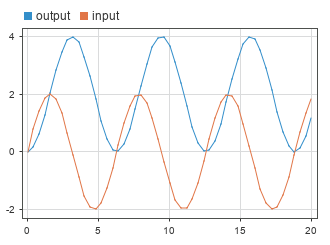
仿真运行 20 秒,对振幅为 2 的正弦波求积分。
使用名称-值参数配置仿真
通过将仿真的配置参数指定为 sim 函数的名称-值参量,可以将模型的仿真配置为使用不同模型配置参数值。您指定的参数值将应用于仿真,并在仿真完成时还原。
您只能将模型配置参数值指定为 sim 函数的名称-值参量,而不能将模块参数值指定为参量。要在单一输入中指定仿真的模型配置参数值、模块参数值和变量值,请改用 Simulink.SimulationInput 对象。
打开模型 IntegrateSine。该模型使用 Integrator 模块对 Sine Wave 模块的输出进行积分。Integrator 模块的输出连接到 Outport 模块。
mdl = "IntegrateSine";
open_system(mdl);
假设您要使用 ode45 求解器和 20 秒的仿真停止时间对模型进行仿真。指定仿真的 Solver 和 StopTime 值作为 sim 函数的名称-值参数。
out = sim(mdl,"Solver","ode45","StopTime","20");
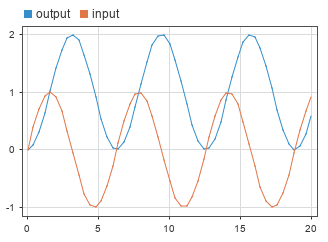
该模型使用求解器 ode45 进行仿真,直到到达仿真时间 20 秒处。
使用配置参数结构体配置仿真
您可以使用由模型配置参数的名称和值组成的结构体来配置模型的仿真。将结构体中的配置参数值应用于模型进行仿真。仿真后,任何发生更改的模型设置都将还原为原始值。
结构体输入只能指定模型配置参数值,而无法指定要在仿真中使用的不同模块参数或变量值。要在单一输入中指定仿真的模型配置参数值、模块参数值和变量值,请改用 Simulink.SimulationInput 对象。
打开模型 IntegrateSine。该模型使用 Integrator 模块对 Sine Wave 模块的输出进行积分。Integrator 模块的输出连接到 Outport 模块。
mdl = "IntegrateSine";
open_system(mdl)
创建结构体 SimConfig,该结构体将仿真配置为使用 ode45 求解器且仿真停止时间为 20 秒。对于要在仿真中修改的每个配置参数,该结构体都包含一个对应的字段。每个字段的名称与对应的参数的编程名称匹配。每个字段的值指定仿真中使用的该参数的值。
simConfig.Solver = "ode45"; simConfig.StopTime = "20";
使用结构体中的模型配置参数值仿真模型。
out = sim(mdl,simConfig);
该模型使用 ode45 求解器进行仿真,仿真时间 20 秒。
使用 Simulink.ConfigSet 对象配置仿真
Simulink.ConfigSet 对象存储一组模型配置参数值。您可以将 Simulink.ConfigSet 对象指定为 sim 函数的输入。该对象中的配置集将应用于要仿真的模型。在仿真后,模型中将还原原始配置集。
Simulink.Configset 对象仅存储模型配置参数值。要在单一输入中指定仿真的模型配置参数值、模块参数值和变量值,请改用 Simulink.SimulationInput 对象。
打开模型 IntegrateSine。该模型使用 Integrator 模块对 Sine Wave 模块的输出进行积分。Integrator 模块的输出连接到 Outport 模块。
mdl = "IntegrateSine";
open_system(mdl)
使用 getActiveConfigSet 函数获取当前模型配置的 Simulink.ConfigSet 对象。
mdlConfig = getActiveConfigSet(mdl);
使用 copy 函数创建要修改的 Simulink.ConfigSet 对象的副本。
simConfig = copy(mdlConfig);
修改 Simulink.ConfigSet 对象 simConfig 以使用 ode45 求解器并将仿真停止时间设为 20 秒。
set_param(simConfig,"Solver","ode45","StopTime","20");
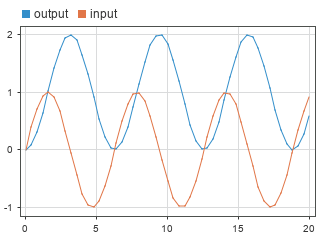
使用 Simulink.Configset 对象 simConfig 中的配置参数仿真模型。
out = sim(mdl,simConfig);
该模型使用 ode45 求解器进行仿真,仿真时间 20 秒。
输入参数
输出参数
提示
为了确保不管您指定哪些输入参量,
sim函数都以相同的格式返回结果,请在启用单一仿真输出参数的情况下保存您的模型。启用此选项后,仿真结果将以Simulink.SimulationOutput形式返回,其中包含所有记录的数据和仿真元数据,包括计时信息和诊断。当所有仿真数据和元数据都集中存储在一个对象中时,分析多个仿真的结果会更容易。要获取模型配置参数列表,请使用
getActiveConfigSet函数和get_param函数。例如,要查看模型vdp的配置参数,请在 MATLAB 命令行窗口中输入以下命令。configSet = getActiveConfigSet("vdp"); configSetNames = get_param(configSet,"ObjectParameters")
get_param函数的返回结果列出模型配置参数,如StopTime、SaveTime、SaveState、SaveOutput和SignalLogging。在仿真模型层次结构时,以
sim函数的输入参量形式指定的模型配置参数将应用于顶层模型。使用
sim函数运行仿真时,仿真会一直运行,直到出现错误或仿真到达指定的停止时间。要以编程方式运行可以编程方式暂停和继续的交互式仿真,请使用带SimulationCommand输入参数的set_param函数。有关详细信息,请参阅以编程方式运行仿真。当您仿真停止时间为无限长的模型时,通过按 Ctrl+C 键从 MATLAB 命令行窗口停止仿真。仿真停止,仿真结果不会保存在 MATLAB 工作区中。
使用“配置参数”对话框配置时间、状态和输出的记录。在建模选项卡上的设置下,点击模型设置。然后,在“配置参数”对话框中,选择数据导入/导出。
要记录整个模型中的信号,请使用信号记录或记录模块,如 To Workspace 模块或 Record, XY Graph 模块。有关信号记录的详细信息,请参阅使用信号记录保存信号数据。
版本历史记录
在 R2006a 之前推出You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)