Control System Toolbox 提供了多种算法和 App,用于系统化地分析、设计和调节线性控制系统。您可以将系统指定为传递函数、状态空间、零极点增益或频率响应模型。借助 App 和函数,如阶跃响应图和波特图,您可以在时域和频域中分析和可视化系统行为。
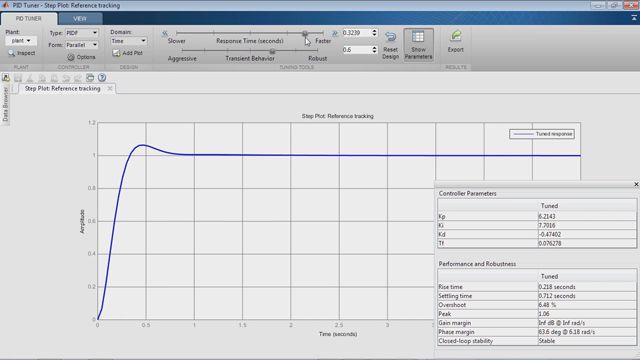
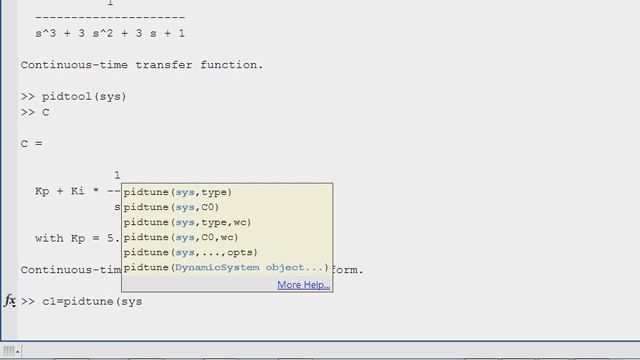
您可以使用波特环路成形和根轨迹等交互式方法,对补偿器参数进行调节。该工具箱可用于自动调节 SISO 和 MIMO 补偿器,包括 PID 控制器。补偿器可以包含跨若干反馈环路的多个可调模块。您可以调节增益调度控制器并指定多个调节目标,如参考跟踪、扰动抑制和稳定裕度。您还可以通过校验上升时间、超调、稳定时间、增益和相位裕度及其他需求来验证您的设计。
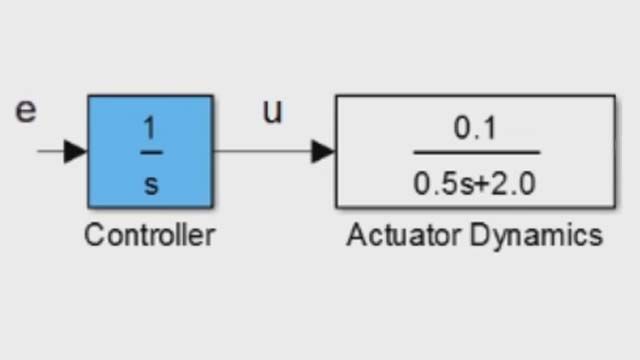
动态系统建模
以传递函数、(稀疏)状态空间模型、LPV 和 LTV 模型形式及其他表示形式创建控制系统的线性模型。离散化和重采样模型。通过降低模型阶数,简化分析和控制设计。
线性分析
在时域和频域中可视化系统行为。计算系统特性,如上升时间、超调和稳定时间。通过计算增益和相位裕度以及穿越频率来分析系统稳定性。
Simulink 中的控制设计
使用 Simulink Control Design,分析和调节在 Simulink 中建模的控制系统,并分析其时域和频域特征。线性化 Simulink 模型并计算时间和频率响应。以图形方式或自动方式调节在 Simulink 中建模的反馈环路。

产品资源:

“Simulink 使我们能够在短时间内构建稳定的控制系统。我们对整个系统进行了建模,包括状态机和级联 PI 控制器。我们还对该模型进行了完善,以提高稳健性和响应速度,然后通过快速控制原型对其进行了验证,并生成了嵌入式代码。”
René Pätznick,WOM



您也可以从以下列表中选择网站:
美洲
- América Latina (Español)
- Canada (English)
- United States (English)
欧洲
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
亚太
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)