Model Predictive Control Toolbox 提供了用于开发模型预测控制 (MPC) 的函数、App、Simulink 模块和参考示例。对于线性问题,该工具箱支持隐式、显式、自适应和增益调度 MPC 的设计。对于非线性问题,您可以实现单级和多级非线性 MPC。该工具箱提供了可部署的优化求解器,同时还允许您使用自定义求解器。
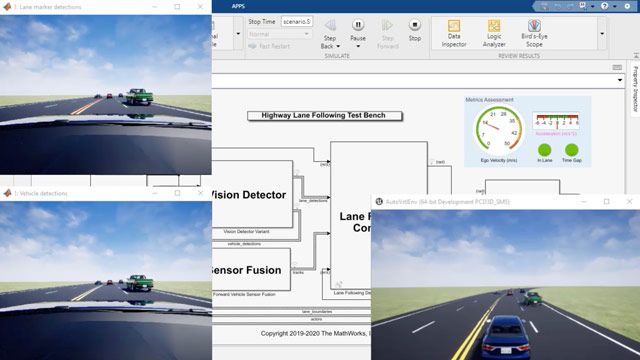
您可以在 MATLAB 和 Simulink 中通过运行闭环仿真来评估控制器性能。对于自动驾驶,您还可以使用提供的 MISRA C® 和 ISO 26262 合规的模块和示例快速实现车道保持辅助、路径规划、路径跟随和自适应巡航控制等应用。
该工具箱支持 C 和 CUDA® 代码以及 IEC 61131-3 结构化文本生成。


MPC 设计器
使用 MPC 设计器以交互方式设计隐式 MPC 控制器,使用 Simulink Control Design 线性化您的 Simulink 模型,使用仿真场景验证控制器性能,并比较多种设计的响应。

非线性 MPC 设计
设计使用 Optimization Toolbox 求解非线性规划 (NLP) 问题的非线性和经济型 MPC 控制器。使用单级或多级公式进行最优规划和反馈控制。


MPC 优化求解器
选择内置的活动集、内点和混合整数 QP 求解器,或使用 Optimization Toolbox 提供的 NLP 求解器。或者,使用 FORCESPRO 求解器(由 Embotech 提供)或您自己的自定义求解器。

预测模型设定
通过以下方法以解析方式指定预测模型:使用 Control System Toolbox 或 Symbolic Math Toolbox、通过 Simulink Control Design 对 Simulink 模型进行线性化,或通过 System Identification Toolbox 和 Deep Learning Toolbox 使用测量数据。


闭环仿真
通过使用符合 ISO 26262 和 MISRA C 标准的 Simulink 模块在 Simulink 中运行闭环仿真或在 MATLAB 中使用命令行函数来评估控制器性能。使用 Simulink Test 自动对多个场景进行测试。

产品资源:

“住友工程机械在不牺牲挖掘机动力性能的情况下实现了 15% 的油耗降低。这种效率的提升是因为我们使用 Model Predictive Control Toolbox 改进了控制设计,使得发动机的转速波动减少了 50%。”
Eisuke Matsuzaki,住友重工
下一步是什么?



您也可以从以下列表中选择网站:
美洲
- América Latina (Español)
- Canada (English)
- United States (English)
欧洲
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
亚太
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)