Stateflow 提供了一种图形化语言,其中包括状态转移图、流程图、状态转移表和真值表。您可以使用 Stateflow 来描述 MATLAB 算法和 Simulink 模型如何对输入信号、事件和基于时间的条件作出反应。
Stateflow 有助于设计和开发监督控制、任务调度、故障管理、通信协议、用户界面和混合系统。
使用 Stateflow,您可以对组合和时序决策逻辑进行建模,然后可以将其作为 Simulink 模型中的模块进行仿真,或者作为 MATLAB 中的对象执行。通过图形动画,您可以在执行逻辑时对其进行分析和调试。编辑时和运行时检查可确保在实现前设计具有一致性和完整性。
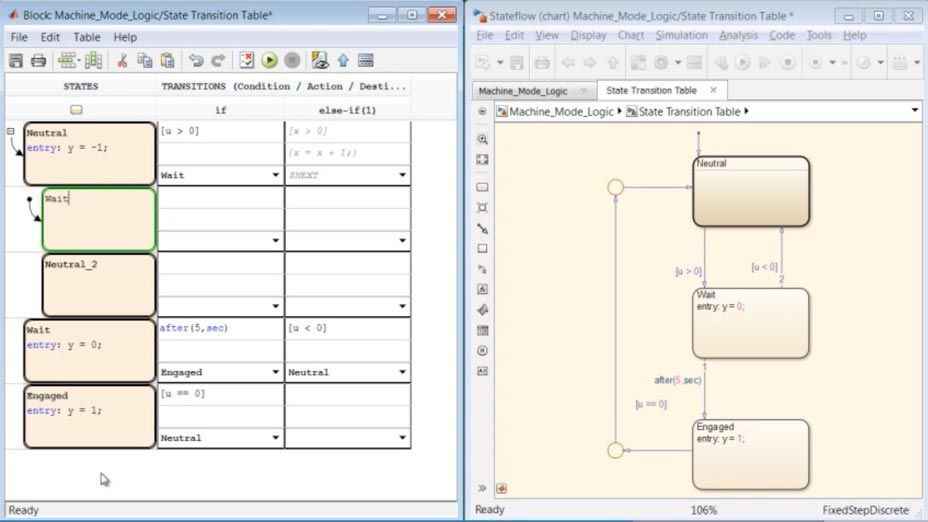
设计状态机
使用 Stateflow,您可以使用拖放元素和简单的逻辑语句来设计状态机。Stateflow 入门之旅和培训可帮助您快速入门。

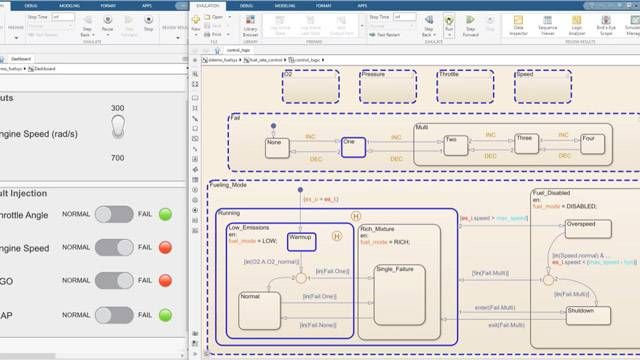
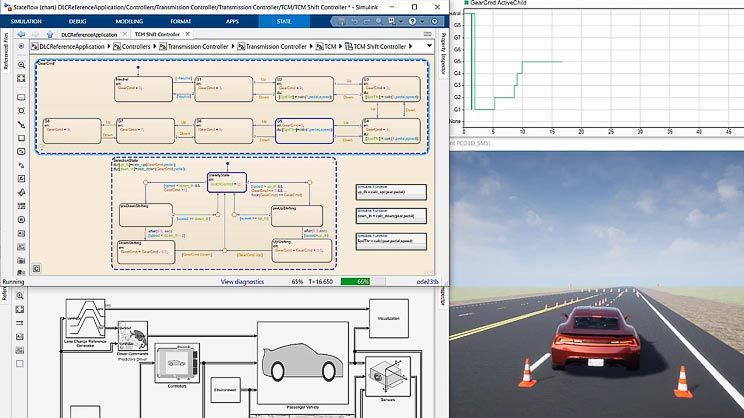
执行 Stateflow 图
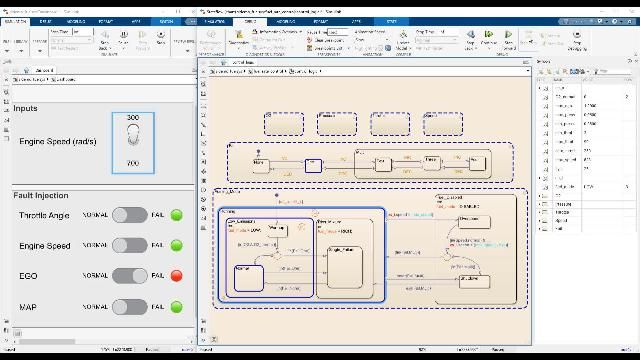
当执行状态图时,动画会突出显示活动状态和转移。您可以在执行过程中手动修改变量,以可视化它们对系统的影响。

在 Stateflow 中调试逻辑
Stateflow 的调试功能可让您详细地对状态图的执行进行逐步调试。您可以在状态图中设置断点并逐步执行不同函数,以了解意外的行为。

Stateflow 的任务调度
Stateflow 可以周期性或连续地调用 Simulink 算法来调度组件的执行,并对您的实时环境进行仿真。

使用 Simulink 验证设计
Stateflow 与其他 MathWorks 产品无缝集成,可用于验证、确认和测试您的设计。您可以使用这些产品来确保您的设计满足需求,更早地发现错误,以及达到质量目标。

产品资源:
“在深空 1 号之前,状态图和自动代码生成技术未曾用于航天器航电设备软件的大型系统。MathWorks 工具使这种应用成为了可能。”
Wesley Huntress 博士,NASA
有疑问吗?
下一步是什么?
面板导航

Stateflow 入门之旅
学习使用 Simscape 仿真物理系统的基础知识


您也可以从以下列表中选择网站:
美洲
- América Latina (Español)
- Canada (English)
- United States (English)
欧洲
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
亚太
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)