Robotics System Toolbox 为设计、仿真、测试和部署操作臂与移动机器人应用提供了工具和算法。对于操作臂,该工具箱包含了使用刚体树表示形式的碰撞检查、路径规划、轨迹生成、正向和反向运动学以及动力学的算法。对于移动机器人,该工具箱提供了用于映射、定位、路径规划、路径跟随和移动控制的算法。
通过该工具箱,您可以构建测试场景,并使用提供的参考示例来验证常见工业机器人应用。它还包括商用工业机器人模型库,您可以导入、可视化、仿真这些模型并将其与参考应用结合使用。
您可以通过结合所提供的运动学和动力学模型来开发功能性机器人原型。借助该工具箱,您可以通过直接连接到 Gazebo 机器人仿真器来协同仿真您的机器人应用。要在硬件上验证您的设计,您可以连接到 Kinova Gen3 和 Universal Robots UR 系列机器人等机器人平台,并使用 MATLAB Coder 或 Simulink Coder 生成和部署代码。

机器人建模
对移动机器人和操作臂的运动学和动力学进行建模。使用常用机器人模型,或者导入 URDF 文件或 Simscape Multibody 模型来创建自定义机器人模型。可视化和仿真机器人运动以验证您的算法。

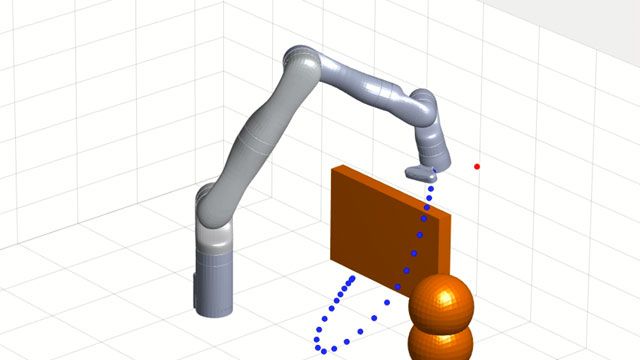
运动规划和轨迹生成
使用可自定义的基于采样的规划器(例如 RRT)来规划路径。使用 Navigation Toolbox 设计可自定义的运动规划器。在避开障碍物的同时,围绕全局路径生成平滑运动的轨迹。
场景和仿真
创建机器人场景并整合传感器模型,以在仿真环境中测试自主机器人算法。通过与 Gazebo simulator 对接,在虚拟仿真环境中验证您的机器人模型。

硬件连接和部署
连接 Kinova Gen3 和 Universal Robots UR 系列等机器人平台,以部署协作机器人 (cobot) 应用。生成用于快速原型构建和硬件在环 (HIL) 测试的 C/C++ 代码和 MEX 函数。
产品资源:
下一步是什么?



您也可以从以下列表中选择网站:
美洲
- América Latina (Español)
- Canada (English)
- United States (English)
欧洲
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
亚太
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)