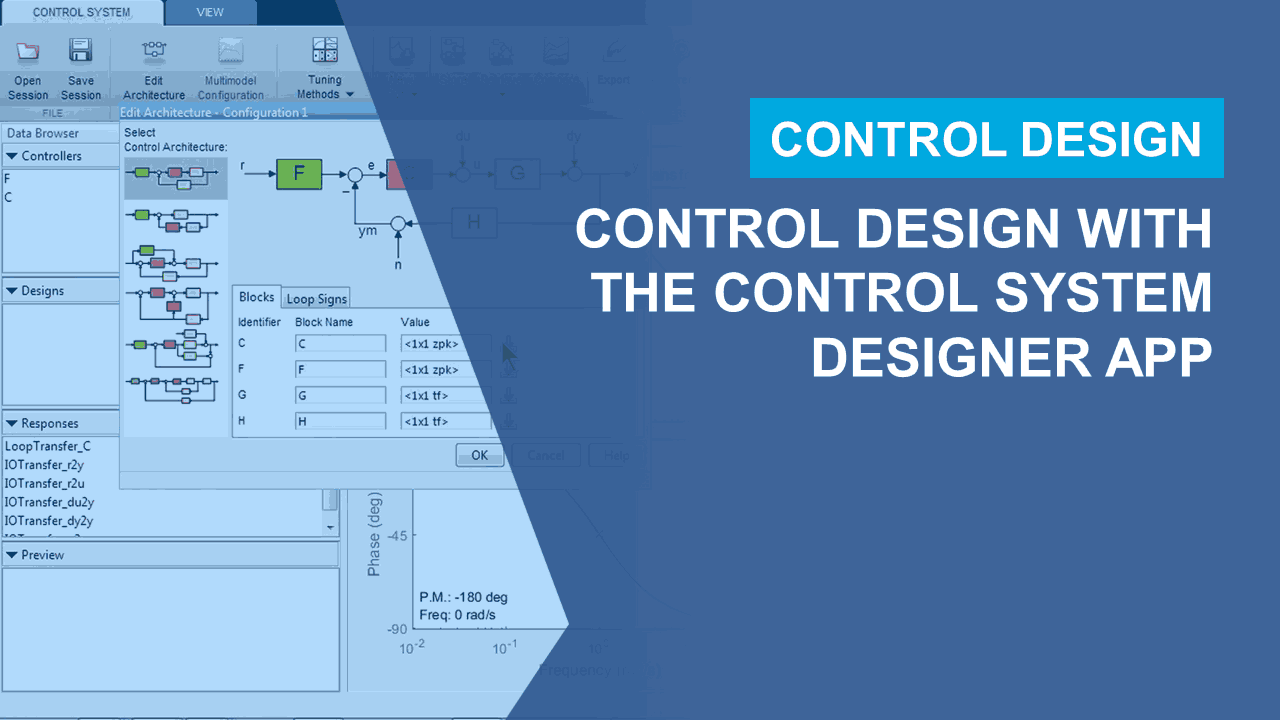
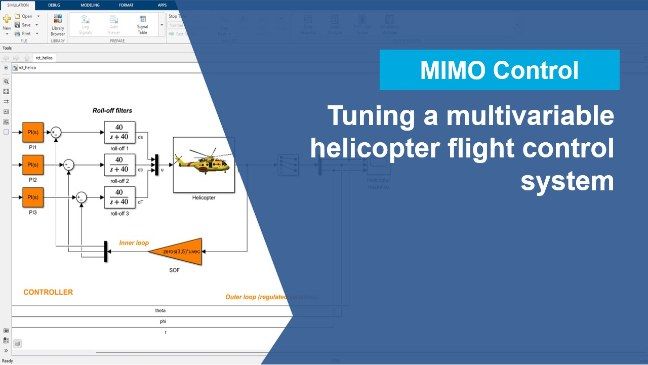
Simulink Control Design 支持您设计和分析用 Simulink 建模的控制系统。您可以自动调节任意 SISO 和 MIMO 控制架构,包括 PID 控制器。PID 自动调节功能可以部署到嵌入式软件,以便实时自动计算 PID 增益。如果您的应用要求控制器必须适应不断变化的被控对象和扰动动态特性,您也可以实现自抗扰控制、极值搜索控制和模型参考自适应控制算法。
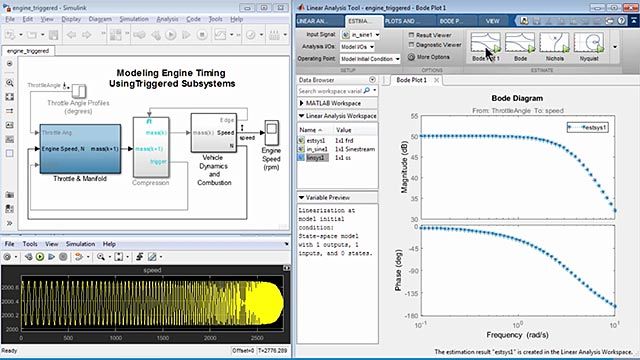
您可以找到各个工况点,计算 Simulink 模型在不同工况下的精确线性化。借助 Simulink Control Design 提供的工具,您无需修改模型,就可以计算基于仿真的频率响应。
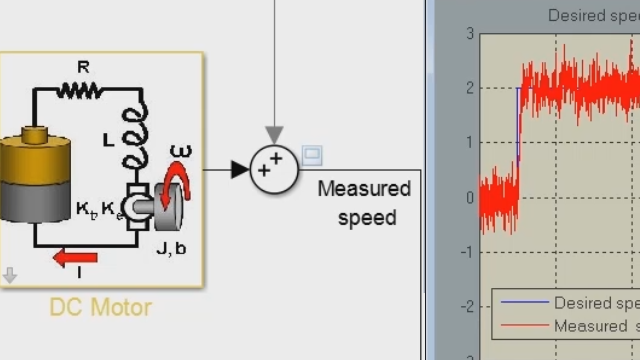
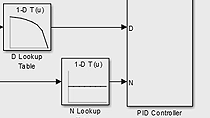
PID 控制器调节
使用 PID 调节器在 Simulink 模型中自动调节 PID 控制器。通过为 Closed-Loop PID Autotuner 模块生成 C 代码,在嵌入式硬件上部署并运行 PID 调节算法。



产品资源:

“MathWorks 的工具提供了一个集成式环境,便于我们打造客户所需的创新技术功能,帮助我们简化了设计过程。”
Laurence Lane,Haldex
下一步是什么?



您也可以从以下列表中选择网站:
美洲
- América Latina (Español)
- Canada (English)
- United States (English)
欧洲
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
亚太
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)