Simulink 适用于基于模型的设计
从概念到运营
为实现复杂系统开发转型,众多领军企业选择采用基于模型的设计,在整个流程中系统地使用模型。
- 使用虚拟模型在开发早期经常进行系统仿真和测试
- 使用物理模型、硬件在环测试和快速原型确认您的设计
- 生成产品级 C、C++、CUDA、PLC、Verilog 和 VHDL 代码,并直接部署到您的嵌入式系统
- 在需求、系统架构、组件设计、代码和测试之间建立可追溯性,维护数字线索
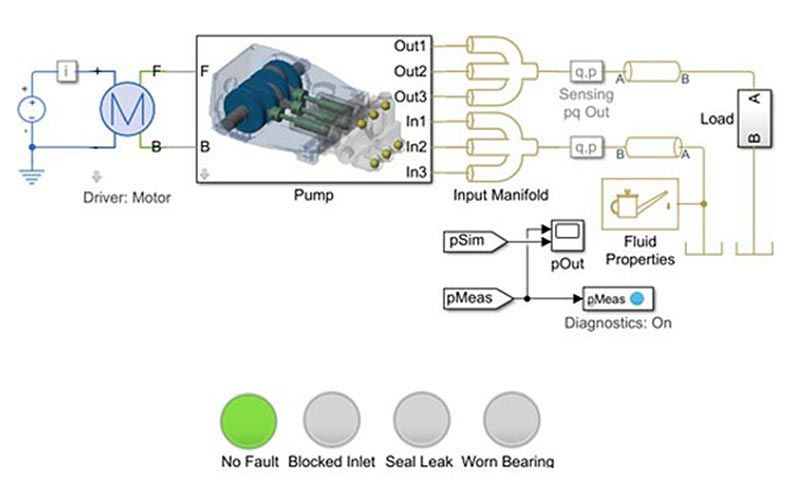
- 将模型扩展到运营中的系统,以执行预测性维护和故障分析

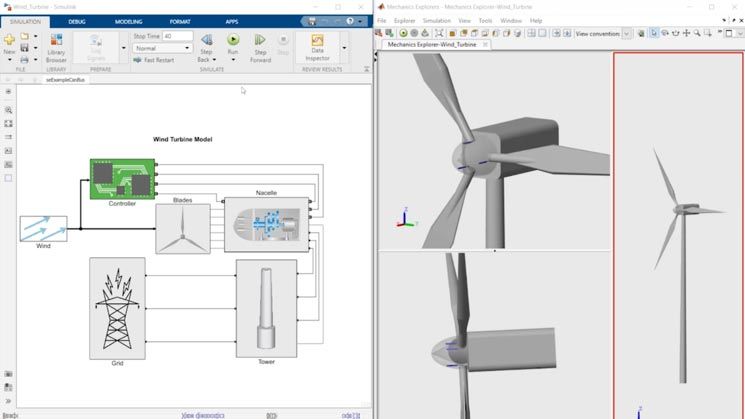
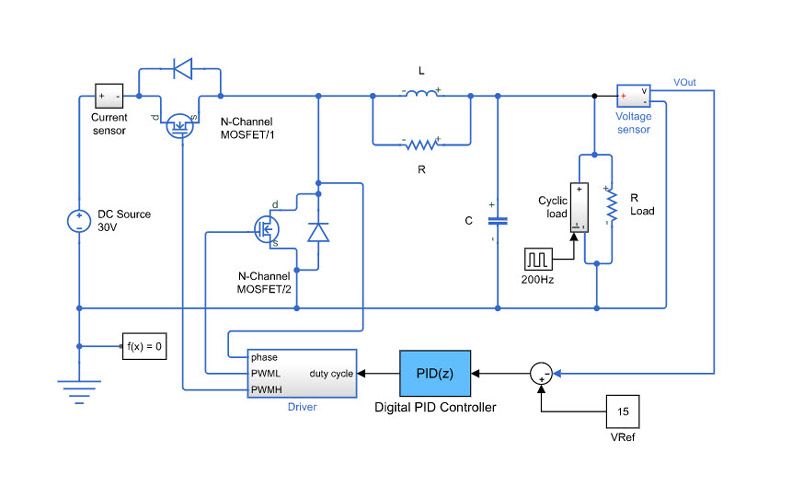
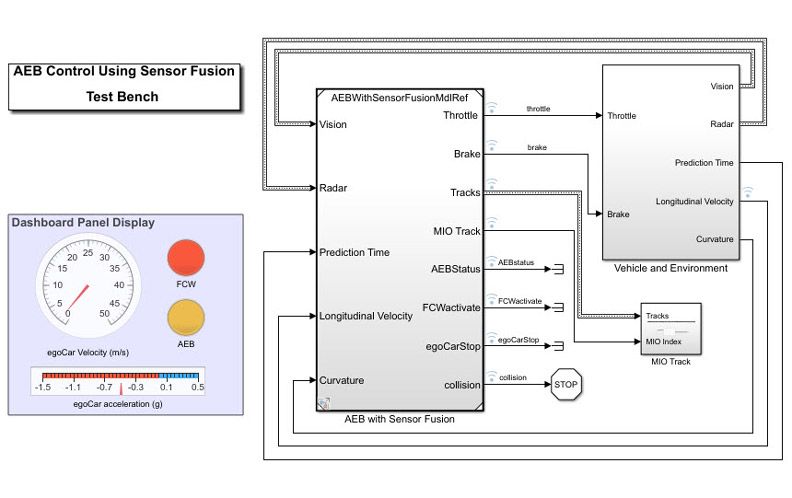
Simulink 适用于仿真
在转向硬件之前,设计并仿真您的系统
探索广阔的设计空间,通过多域建模和仿真尽早测试您的系统。
- 在一个多域仿真环境中快速评估多种设计思路
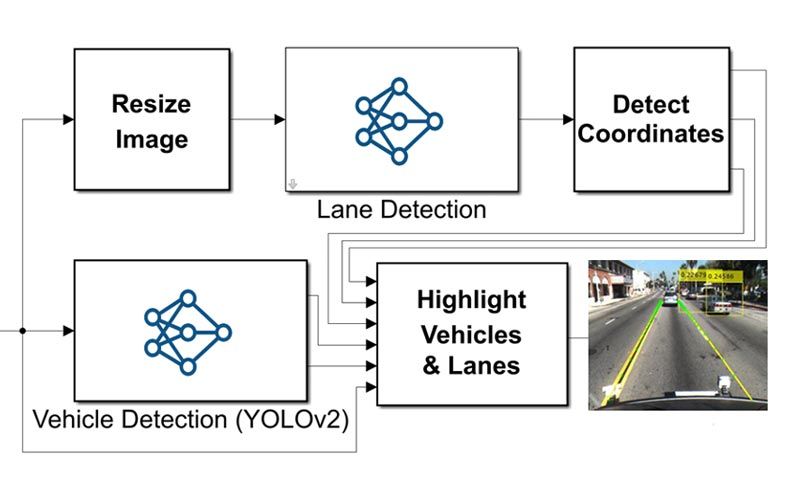
- 使用可重用组件和库(包括专用第三方建模工具)仿真大型系统模型
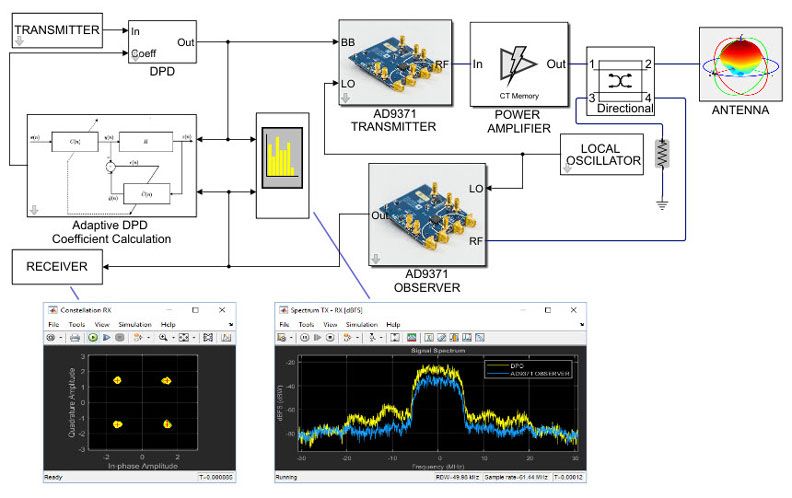
- 为桌面、实时和硬件在环测试部署仿真模型
- 在多核桌面、集群和云上运行大型仿真

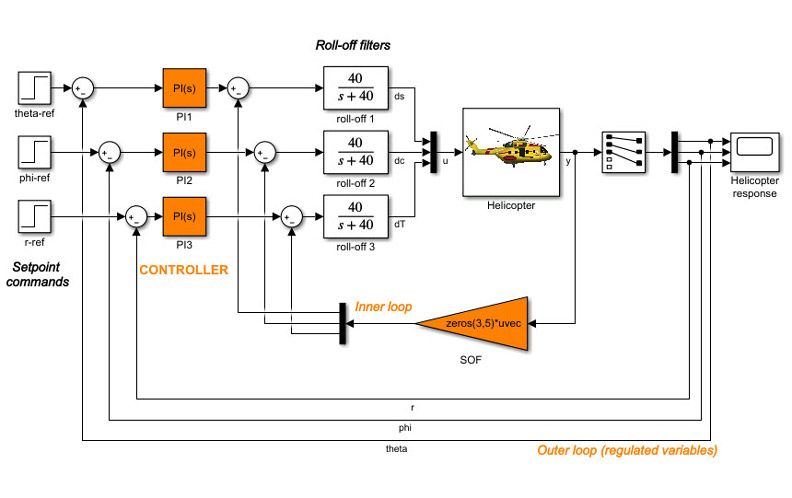
Simulink 适用于基于模型的系统工程
设计、分析和测试系统架构与软件架构
基于模型的系统工程 (MBSE) 运用模型支持整个系统生命周期。从需求和系统架构到详细的组件设计、实现和测试,Simulink 在各个开发环节之间架起桥梁。
- 捕获并分解需求
- 定义和阐述组件、组合和架构的设定
- 为架构和组件级接口建立单一源
- 使用 MATLAB 进行分析和权衡研究
- 使用基于仿真的测试确认需求和验证系统架构
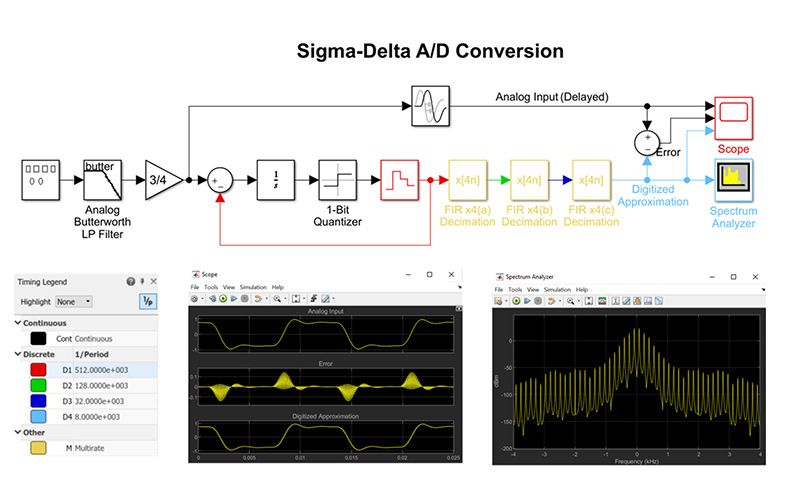
Simulink 适用于敏捷软件开发
敏捷软件开发强调持续集成和团队协作,帮助团队以更短的迭代周期更快地向客户交付价值。仿真、自动测试和代码生成缩短了开发周期,让您的团队成功实现敏捷化。
- 在自动化服务器中开发和运行仿真测试,以持续验证新的设计迭代
- 在转向硬件之前,在桌面上执行更多分析和测试
- 通过仿真交付可用的软件,以便客户评估
- 通过模型更新和仿真快速响应不断变化的需求
- 通过自动化报告和仪表板让主要利益相关方看到进度


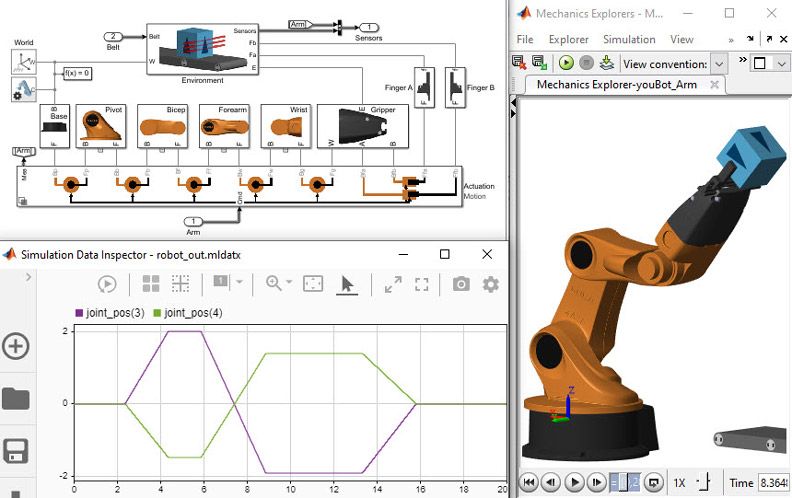
Simulink 适合 MATLAB 用户
将 MATLAB 与 Simulink 相结合,您就拥有了一个兼具文本和图形编程功能的一体式环境。
运用 MATLAB 知识,您可以:
- 优化参数
- 创建新模块
- 编写测试和自动化脚本
- 并行运行数千个仿真
- 分析仿真结果

“在我们的开发过程中,Simulink 在两个阶段起到了特别大的帮助。在早期阶段,它帮助我们尝试新想法,并将其实施效果可视化。在代码生成和车载测试后的这个阶段,我们可以运行多次仿真,优化设计,并为下一次迭代重新生成代码。”
Jonny Andersson, Scania

下一步是什么?



您也可以从以下列表中选择网站:
美洲
- América Latina (Español)
- Canada (English)
- United States (English)
欧洲
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
亚太
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)